Successful Underwater Survey at the End of 2025

At the very end of 2025, we completed a series of underwater survey days in collaboration with Israel Nature and Parks Authority and the Sponge Research Laboratory of Prof. Micha Ilan at Tel Aviv University. The surveys were carried out along the Israeli coastline, at depths ranging from 10 to 100 meters, and provided an […]
News from Around the World
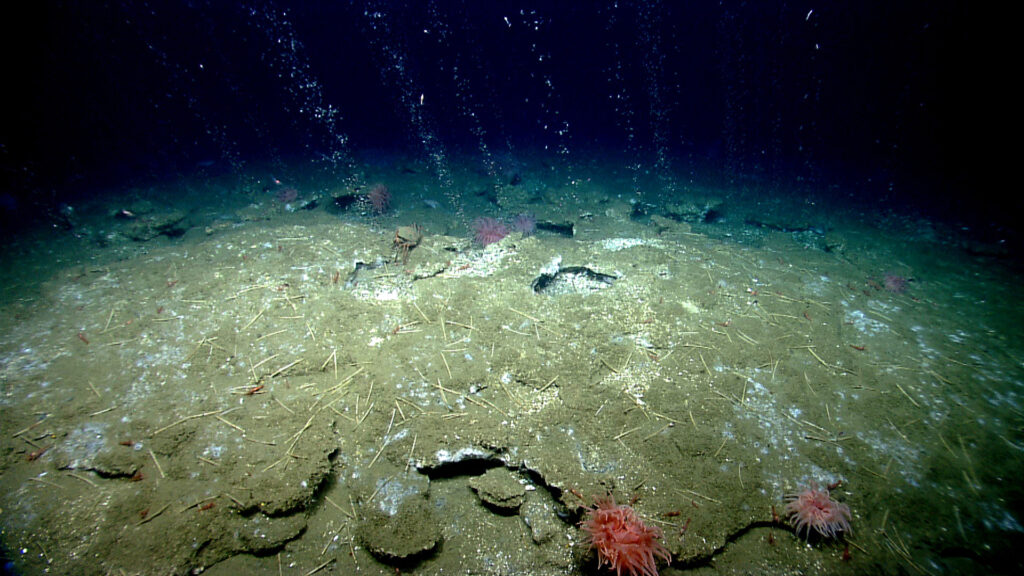
Deep Sea Methane Bubbles in Argentina Join a fascinating expedition aboard the research vessel R/V Falkor (too), operating off the coast of Argentina, where scientists embark on a deep-sea “bubble hunt.” The video reveals spectacular methane gas seeps rising from the seafloor – creating a vibrant oases of life in environments once considered hostile and […]
Underwater 3D Imaging: Introducing the C3 Stereo Camera

We are excited to introduce a significant advancement in underwater sensing capabilities: the MarineSitu C3 Stereo Camera – a cutting-edge imaging system that combines advanced hardware with powerful data processing – ready to be plugged in to your BlueROV2 or any other vehicle. A combination of 3 cameras Unlike conventional stereo camera systems, the C3 operates […]
Underwater Wireless Charging
After concluding a successful year of deep-water surveys, we always keep our focus on technologies that have the potential to change how underwater operations are performed. This time, we would like to share an exciting innovation from Blue Robotics: the UWCS – Underwater Wireless Charging System. What Is UWCS? The UWCS is an advanced prototype […]
Underwater Footage: BlueROV2 Captures Another ROV in Action

https://www.youtube.com/watch?v=nnGSATY2L9Y In this video, one ROV is deployed to document the operation of another BlueROV2 during an underwater shipwreck exploration.The footage highlights the BlueROV2’s exceptional imaging and navigation capabilities, utilizing high-intensity lighting and a high-resolution camera to capture detailed visuals of the submerged environment. The survey was conducted as part of a marine research mission, […]
Our New ROV is Getting Ready for Its First Mission with Gigablue
https://astralsubsea.com/wp-content/uploads/2025/10/WhatsApp-Video-2025-10-22-at-12.27.05.mp4 Astral Subsea has recently completed the development and construction of a dedicated ROV system for the Israeli company Gigablue, as part of a joint project aimed at strengthening deep-sea monitoring capabilities. The new system was designed and built by Astral Subsea’s engineering team, tailored to the specific requirements of a challenging operational environment and […]
New ROV Design

Coming Soon: Our New Underwater Robot – Designed from Experience https://astralsubsea.com/wp-content/uploads/2025/07/WhatsApp-Video-2025-07-28-at-18.38.40.mp4 At Astral Subsea, we’re building a new ROV system, powerful enough for deep-sea missions, yet compact enough to launch from small boats with limited space and power. The new system features: Battery-powered operation – no need for external power sources Durable, thin fiber optic […]
New Technologies

3D live sonar (point cloud) for compact ROVs Weighing less than 400 grams in water and measuring approximately 12 x 8 x 4 cm, the Sonar 3D-15 is perfectly suited for small to medium-sized ROVs. It’s an ideal solution when space and weight are limited, yet high-resolution underwater imaging is still essential. Live 3D Visualization […]
Underwater Nature

Graceful Nudibranch Caught on Camera During a routine survey of an underwater gas pipeline using one of our robots, we took a moment to zoom in on a colorful and beautiful Nudibranch gliding gracefully along the seafloor – completely unfazed by the strange, glowing creature that had settled in front of it. The footage was […]
Photogrammetry during an ROV survey

During a routine survey of an underwater asset, using one of our ROVs, we performed an up-close detailed inspection of the asset and later on converted the video to a 3D photogrammetry model. Considering the fact that this was an on-the-go model, and not an intended photogrammetry survey, the result was quite satisfying and demonstrates […]